Research Scientists at the University of Idaho, Massachusetts Institute of Technology – Lincoln Laboratories, and 3DEO present an overview of the importance of 3D digital forest twins, the utility of different laser (LiDAR) sensors and platforms for creating digital twins, and an introduction to advancements in Geiger LiDAR and its role in forestry
KEY POINTS:
- Research suggests single tree digital forest twins are vital for ecological and economic forest management.
- Single tree monitoring of forest health, biodiversity, productivity, and carbon storage, support sustainability.
- Laser sensors offer high accuracy for individual tree identification, though challenges remain, depending on sensor (linear, Geiger) and platform (ground, aerial, satellite).
- Geiger-mode laser scanning is gaining traction as a robust alternative to traditional linear-mode laser scanning.
SECTION 1: THE NEED FOR DIGITAL FOREST TWINS
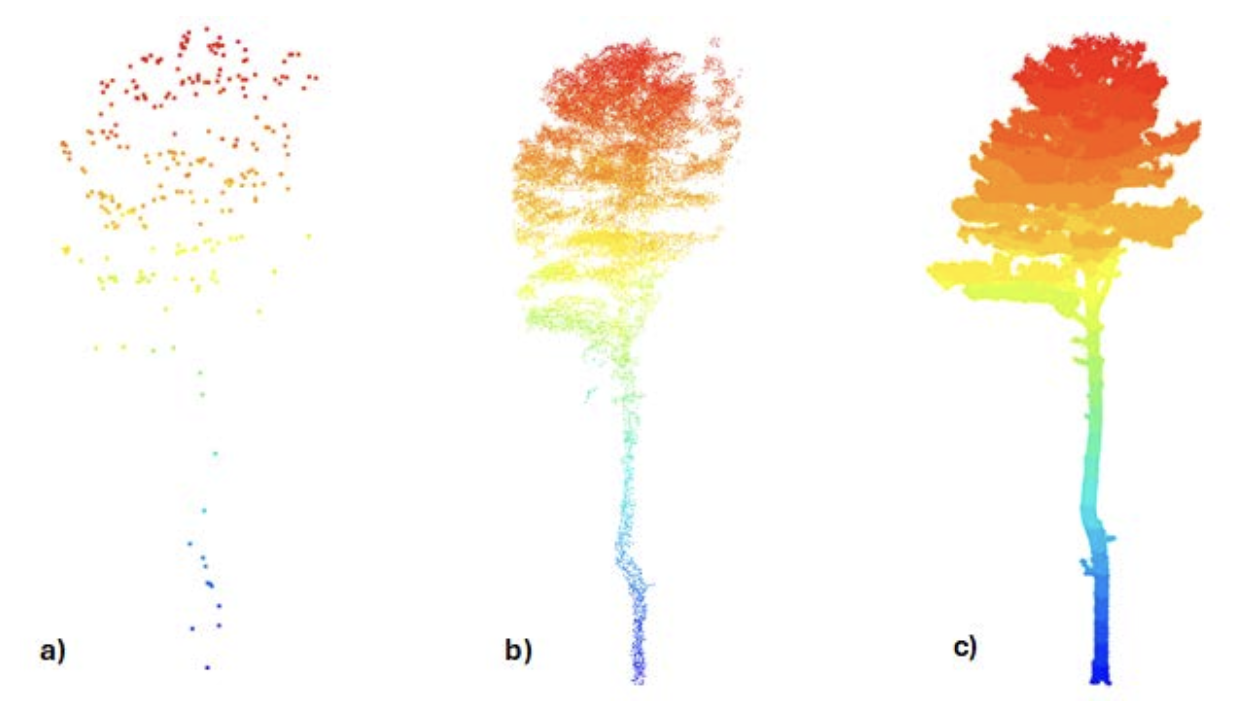
In the digital age, forestry is undergoing a transformation through the adoption of digital twins, particularly single tree twins. These are virtual replicas of individual trees, integrating data from advanced sensors and platforms to mirror their physical and biological states. Single tree digital forest twins are often created using 3D point clouds generated by various laser or photogrammetric sensors (Fig. 1).
This adoption of single tree digital forest twins is driven by a need for enhanced ecological and economic stewardship in the face of increasing demand for forest products, land use conversion, and catastrophic events such as wildfire and epidemic insect outbreaks.
It is critical that limited financial and/or human resources, whether at an organization or agency, are deployed both strategically and tactically to ensure forests are managed relative to ecological limitations, desired forest ecosystem services, and to meet social-cultural expectations.
The advantage of digital single tree twins lies in their ability to provide spatial and temporal context of individual trees with their neighbors (competition for light/water/nutrients) and physiographic environment (climate, topography, soil). This context provides a level of precision untapped through traditional population sampling methods and provides forest resource managers with vital, granular information that can support existing or emerging forest monitoring and measurement technologies.
For example, digital forest twins integrate with cloud-based digital databases, allowing resource managers to instantly map individual tree metrics within a geospatial data management system (e.g., ESRI’s ArcGIS Online paired with SQL Server, Fig. 2).
This granularity, heretofore unavailable to scientists and land managers, is pivotal for both ecological monitoring and economic optimization in forest management. Precision forestry prescriptions can now be tailored and scaled to meet regulatory, ecological, and economic objectives whether the need is to enhance forest growth, refine fire behavior models, monitor carbon sequestration, or map species biodiversity at scale (tree to landscape).
Thus, single tree digital forest twins represent a convergence of technology and ecology, offering unprecedented insights into forest ecosystems. Ecologically, they are essential for monitoring health, biodiversity, and carbon sequestration, while economically, they drive sustainable forestry, precision management, and new revenue opportunities. By informing strategies such as thinning, health monitoring, and fire prevention, digital twins empower foresters to make data-driven decisions that balance ecological preservation with economic viability. As technology continues to evolve, the potential of single tree digital twins to transform forestry will likely grow, paving the way for more resilient and sustainable forests.
SECTION 2: A COMPARISON OF LIDAR SENSORS/PLATFORMS IN QUANTIFYING FOREST ATTRIBUTES
As forest monitoring technologies mature, decision makers are faced with a growing range of options for collecting data on forest structure. Among these, LiDAR (Light Detection and Ranging) has emerged as a critical tool for accurately quantifying key forest attributes such as tree height, canopy cover, and biomass at various scales. However, not all LiDAR systems are created equal. Choosing the right platform depends not only on technical capabilities but also on project objectives, geographic scope, and available resources.
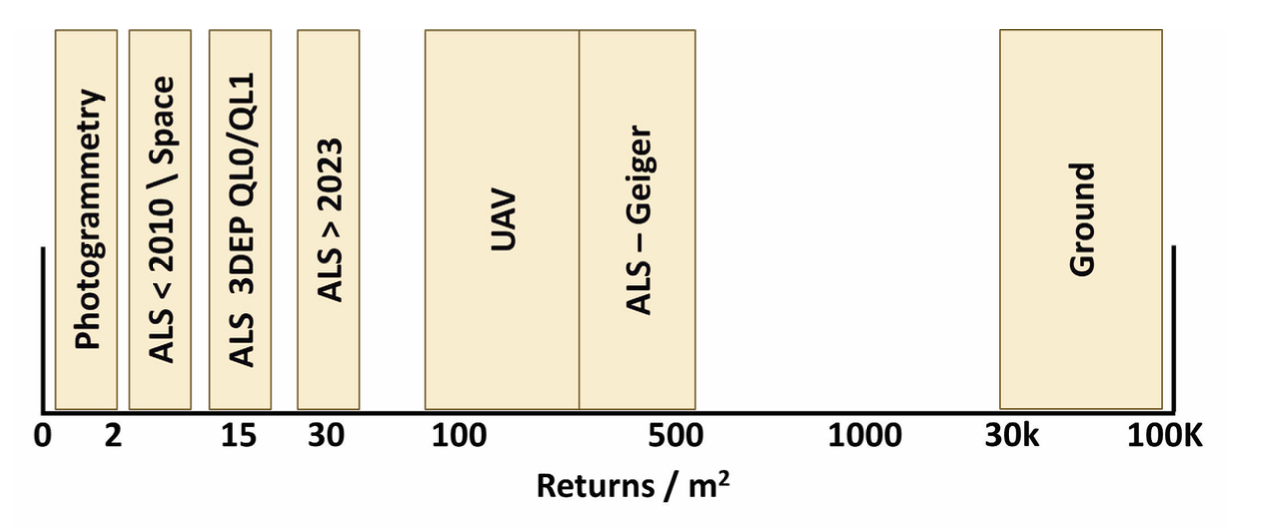
LiDAR systems differ in how they acquire data and in what kinds of forest attributes they can reliably measure (Fig. 3). Traditional airborne LiDAR, such as that used in national mapping programs like the U.S. Geological Survey’s 3D Elevation Program (3DEP), uses linear-mode sensors mounted on fixed-wing aircraft to scan large landscapes. These sensors excel at capturing terrain and canopy structure over broad areas, returning precise x, y, and z location coordinates for billions of points across a landscape. From this, forest height, crown area, and tree spatial distribution can be modeled at stand or plot levels.
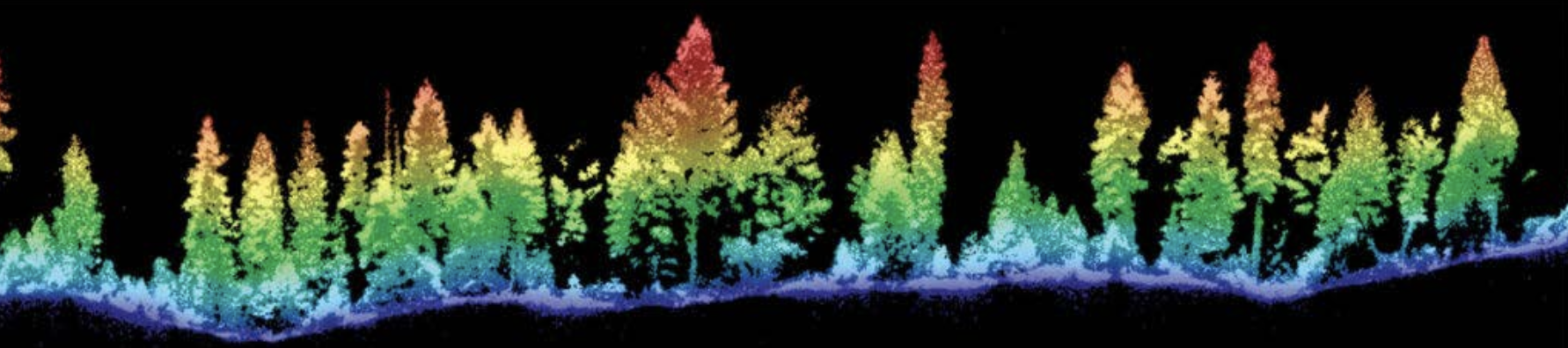
A new generation of airborne Geiger-mode LiDAR sensors that use photon-counting technology offer an alternative approach to high-density forest mapping (Fig. 4). Geiger sensors are more sensitive and can operate at higher altitudes and faster speeds, allowing for rapid coverage of large regions with very dense point clouds. They also have superior foliage penetration capability that enables the imaging of structural detail below the dominant canopy, including tree stems, making them ideally suited to forestry applications. Like linear-mode systems, Geiger LiDAR captures x, y, and z coordinates and supports estimation of tree height and crown area. But Geiger’s higher point density also opens the door to estimating more detailed forest attributes, such as stem diameter at breast height (DBH), particularly for dominant and co-dominant trees in open or semi-open forests. This added resolution can help bridge the gap between airborne and ground-based measurements, particularly for biomass estimation and growth modeling.

Simultaneous Localization and Mapping (SLAM)-based LiDAR systems represent a different class of tool. Typically handheld, backpack-mounted, or attached to an unmanned aerial vehicle (UAV), these systems are designed for close-range scanning within forest plots. Because they collect data at very high resolution and from within the canopy, ground-based SLAM systems are particularly effective for directly measuring DBH, stem taper, and branch structure. In areas of dense canopy, they may be unreliable for imaging treetops, potentially limiting tree height estimation. UAV-based SLAM systems typically fly above the canopy, imaging treetops clearly, but may have challenges imaging detail closer to the ground. SLAM systems are not well suited to covering large areas, and they require ground crews on site to walk through the forest or pilot UAVs, making them labor-intensive compared to airborne methods.

Table 1 (above) summarizes the typical capabilities of each system in terms of several measurable forest attributes.
When selecting a LiDAR platform for forest monitoring, it is important to begin with a clear understanding of the desired products (Fig. 5). For example, if the goal is to develop regional biomass estimates, Geiger LiDAR’s higher resolution may offer better performance than conventional linear mode systems. Conversely, for terrain mapping and general forest structure assessments across broad areas, traditional linear-mode airborne LiDAR remains a cost- effective standard. For detailed assessments within small plots, such as those used in inventory, silvicultural research, or carbon verification, SLAM systems provide the stem- level detail that airborne platforms cannot deliver.
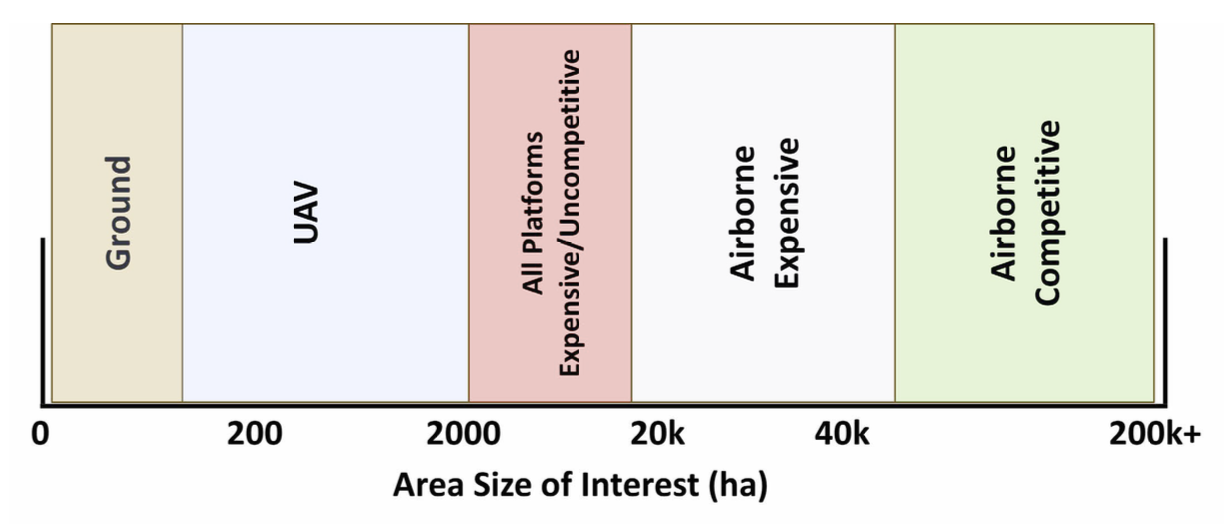
Finally, geographic scale and cost must be considered (Fig. 6). SLAM systems are ideal for individual stands or small research plots but are impractical for national inventories. Airborne linear-mode LiDAR is the most mature and scalable solution for national mapping efforts, especially where regular updates and continuity with past datasets are important. Geiger-mode LiDAR is gaining traction for large-area mapping projects where higher point density is desirable and equipment and expertise are available.
Each LiDAR technology offers trade-offs between resolution, scalability, and cost. As these technologies continue to evolve, a blended approach, leveraging multiple platforms for complementary strengths, may become the new standard in forest monitoring.
SECTION 3: ADVANCEMENTS IN GEIGER-MODE LIDAR
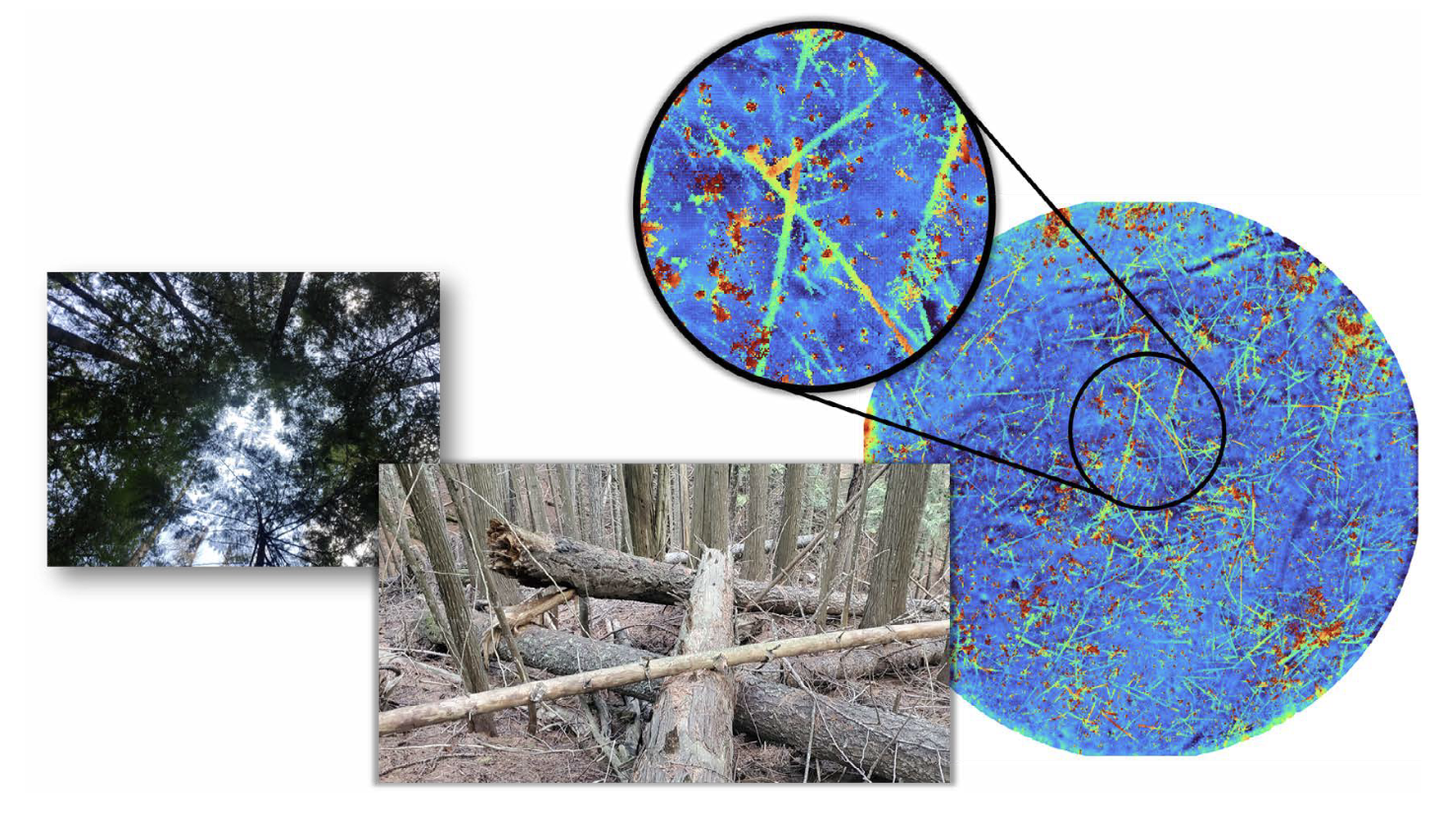
Geiger-mode lidar has been operationally proven by the US military since 2010 and is seeing renewed interest in the commercial geospatial world. 3DEO, a spin-out from MIT Lincoln Laboratory, is providing advanced Geiger-mode lidar systems into the commercial market; this includes sensor hardware and a suite of processing software that enables lidar operators to execute complete projects. The name “Geiger-mode” refers to the physical process by which the faint laser light pulses are received from the ground. As each individual photon is received, an electrical pulse is digitized and time-stamped, analogous to the clicks of a Geiger counter detecting radioactivity. The “clicks” are processed into point clouds using the time of flight of the laser pulse. What is different from the more common “linear mode” lidar is the exquisite sensitivity. A point in the product point cloud is typically established using only 5-10 “clicks” of the Geiger photodetector, arising from 15-30 photons received by the lidar. In contrast, a typical linear mode system needs a minimum of approximately 300 received photons to reliably differentiate the real surface from the noise in the system. Because of this 10-20x lower light requirement, GM lidar systems can collect data at high rates from higher altitudes (e.g., 10,000 m), simplifying operations in rugged terrain and collecting wider swaths on the ground. For forestry and land management applications, this translates to faster coverage of large areas with fewer flights and the ability to target specific zones with remarkable detail (Fig. 7). In addition, weak signals from the surfaces under highly-occluding forest canopy can be differentiated from noise after aggregating data from many laser pulses in post-processing.
One of the unique strengths of Geiger-mode LiDAR is this tradeoff between scale and resolution. When flown at higher altitudes, it can produce a point cloud comparable in quality to traditional linear-mode LiDAR but over a much broader area in less time.
Alternatively, if flown at lower altitudes (e.g., 2,000 m), it can generate extremely dense, high-resolution data that captures fine forest structure, including subcanopy layers and even individual tree stems. This flexibility lets users tailor data collection strategies to their goals: regional-scale monitoring or site-level analysis.
Modern Geiger-mode systems also make use of agile scanning techniques that steer the laser pulses more precisely. This enables collection of target areas that are typically hard to see, like forest understory or terrain hidden beneath dense vegetation, by collecting data from multiple angles and directions (Fig. 8). The result is a more complete picture of forest structure, including improved elevation models and height-above- ground estimates, which are essential inputs for digital forest twins and other advanced applications (Fig. 9). Most importantly, the amount of angular diversity can be matched to the needs of a given project so as to overcome the shadowing and occlusion of the class of vegetation present.
The processing of Geiger-mode lidar data into standard point clouds is somewhat more nuanced than more common linear-mode lidar. Because the raw data describes the detection of individual photons, quantum statistical fluctuations in the number of photons detected on a given physical surface are significant, typically much larger than other noise sources. In addition, the background noise can produce “false positives”, points which do not correspond to real surfaces in the scene. Processing of Geiger-mode data involves aggregating the raw photon detections from thousands of laser pulses collected over many repeated scans of the scene, typically from many different viewpoints. The generation of a 3D point cloud amounts to locating clumps of detected photons and estimating the significance of the clump. When there are too few detections in a clump, the resulting point is labelled with low confidence and can be easily excluded from further analysis. The significance assigned to clumps with a higher number of detections (typically 3 or more) is higher, and those points are assumed to indicate the presence of real surfaces in the scene. In addition to significance, points are also typically labelled with an estimated reflectivity. This per-point metadata proves uniquely useful in many analysis workflows.
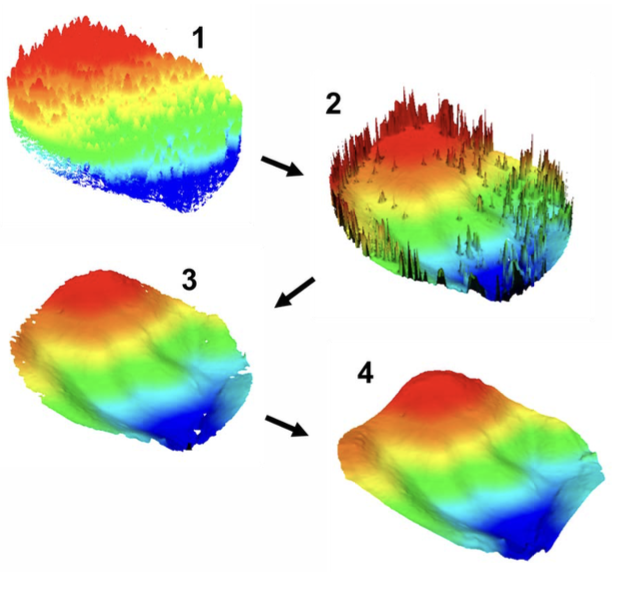
To make use of the dense point clouds collected by Geiger-mode systems, a ground estimation step is typically part of the processing chain so that 3D points may also be labelled with their height above ground (HAG). Algorithms for estimating the terrain are well developed for linear-mode lidar. These algorithms typically assume that all input points correspond to real surfaces in the scene. Typical Geiger-mode point clouds contain points with lower confidence, points that are likely real, but might be just noise. These lower confidence points may violate the assumptions of typical ground finders. In recent work, 3DEO has developed processes to filter the input point clouds so that weak ground points are not lost and below-ground noise points are removed. Established ground finding algorithms may then be applied successfully to the point clouds. Figure 9 indicates the steps in this workflow.