
Researchers pilot-test their jellyfish-inspired underwater robot. Interacting gently with its environment, the robot will collect waste from the bottom of the ocean
The world’s oceans have unfortunately become highly polluted due to human activity. While there are numerous strategies to combat the huge amounts of plastic waste found in these sensitive ecosystems, one method has been to design an underwater robot to collect trash.
‘Jellyfish-Bot’ is an energy-efficient jellyfish-inspired robot which is almost entirely noise-free – and is only the size of a hand.
Safe interactions in delicate environments like coral reefs
Jellyfish-Bot could become an important tool for environmental remediation
Made in a partnership between the Physical Intelligence and Robotic Materials departments at MPI-IS, the underwater robot catches waste under its body, which allows for safe interactions without physical contact in delicate environments like coral reefs.
Current generations of robots which operate underwater are generally quite bulky with rigid bodies, making them unable to explore and sample in complex and unstructured environments.
While also being a lot more noisy, due to electrical motors or hydraulic pumps, scientists looked to nature for inspiration for a more environmentally sensitive design.
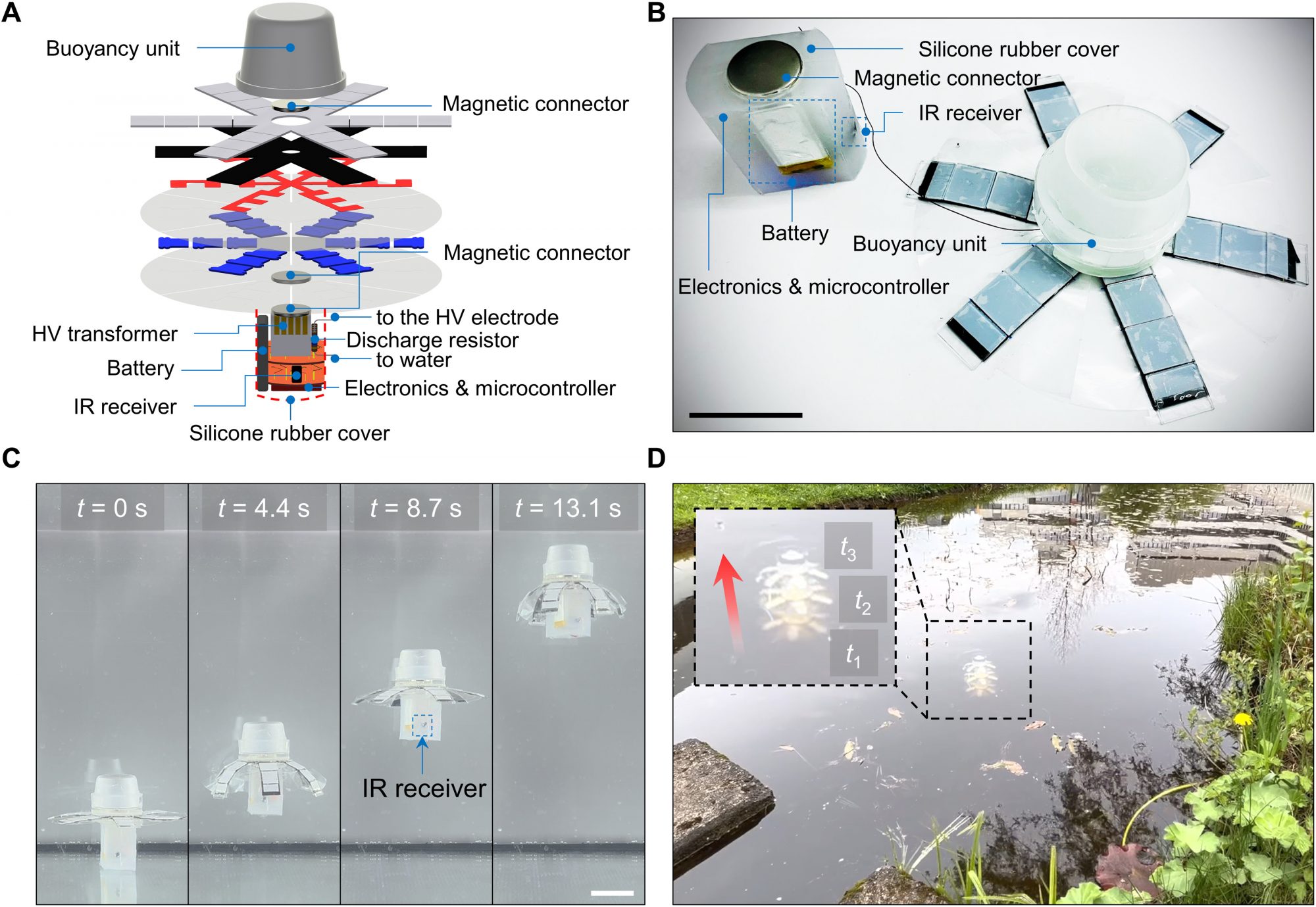
(A) Design details with a computer-aided design (CAD) image. (B) A snapshot of the wireless robot. The prototype was equipped with all electronics onboard, including circuits for HV generation, an infrared (IR) receiver, and batteries. The robot was remotely launched and stopped by a remote infrared controller. (C) Propulsion test in a water tank (f = 1.25 Hz, D = 0.5; movie S8). The robot could operate for 1 hour using a commercial battery (lithium-ion polymer battery; capacity, 350 mAh; nominal voltage, 3.7 V). (D) Propulsion test in a pond outdoors (f = 1.25 Hz, D = 0.5; movie S8). Scale bars, 5 cm
Artificial muscles made by electrohydraulic actuators
Jellyfish-Bots move and capture objects without physical contact, operating either alone or with several in combination – at a high speed of up to 6.1 cm/s.
To reach these speeds, the team used electrohydraulic actuators through which electricity flows. The actuators serve as artificial muscles known as ‘HASELs’ which power the robot.
Applying a high voltage across an electrode charges the robot positively, while surrounding water is charged negatively.
The underwater robot has a power supply which provides electricity through thin wires, causing the muscles to contract and expand. This allows the robot to swim gracefully and to create swirls underneath its body.
Surrounding these muscles are air cushions and components which steady the robot and make it waterproof, allowing the high voltage running through the actuators to not contact the surrounding water.
Finally, its energy-friendly power source only requires a low input power of around 100 mW.
70% of marine litter is estimated to sink to the seabed
Tianlu Wang from the Physical Intelligence Department at MPI-IS, said: “When a jellyfish swims upwards, it can trap objects along its path as it creates currents around its body. In this way, it can also collect nutrients.
“Our robot, too, circulates the water around it. This function is useful in collecting objects such as waste particles. It can then transport the litter to the surface, where it can later be recycled. It is also able to collect fragile biological samples such as fish eggs.
“Meanwhile, there is no negative impact on the surrounding environment. The interaction with aquatic species is gentle and nearly noise-free.”
“There is no negative impact on the surrounding environment”
His co-author Hyeong-Joon Joo from the Robotic Materials Department continues: “70% of marine litter is estimated to sink to the seabed. Plastics make up more than 60% of this litter, taking hundreds of years to degrade.
“Therefore, we saw an urgent need to develop a robot to manipulate objects such as litter and transport it upwards. We hope that underwater robots could one day assist in cleaning up our oceans.
“We achieved grasping objects by making four of the arms function as a propeller, and the other two as a gripper. Or we actuated only a subset of the arms, in order to steer the robot in different directions. We also looked into how we can operate a collective of several robots.”








