
Here, R.M Winglee and M. Danner, Department of Earth and Space Sciences, University of Washington, discuss robotic exploration and High-Velocity Impactors
Robotic exploration has provided new insight into the origins and evolution of many of the major bodies within the solar system, from the planets and their moons to asteroids and comets. However, major discoveries are still waiting to be made if core rock samples could be attained and brought back to Earth for further study. Different attempts for sample return are reviewed in Winglee et al [2017]. The largest collection (nearly 200 kg) was brought back from the Apollo missions and indicated that the Moon, in fact, originated from material ejected from Earth during a large impact in the early days of the solar system.
Since the Apollo mission, robotic missions have taken the lead in sample return missions; to date, these systems have collected and returned only grams of material to Earth. The first, Stardust, was launched in 1999 and returned dust that originated from Comet Tempel 1 in 2006. The comet had components that involve both high and low-temperature processes.
The first sample return mission that actually touched down upon the surface of its target was Hayabusa I launched in 2003, returning to Earth in 2010 with dust (< 1 gm) from asteroid 25143 Itokawa. NASA’s OSIRIS Rex is presently working to get surface samples from Asteroid Bennu with the aim of returning a significantly larger surface sample.
Subsurface samples
However, much greater information could be attained from subsurface samples. The two main contenders are (1) drilling and (2) impactors. While drilling is relatively easy on Earth, the process in space is a lot more complicated. First, the spacecraft must land and be securely attached to the surface; attempts to place a small lander on a comet by the Rosetta mission and on an asteroid by the Hayabusa I mission both failed. For the larger drilling systems, Mars InSight and Curiosity have had their drills become stuck. Hayabusa II mission is the first space impactor mission and used pyrotechnics to accelerate a 2 kg copper slug to hyper-velocities (2 km/s) into asteroid 162173 Ryugu to create a crater to expose the subsurface material. Hypervelocity impactors have the disadvantage that they have the potential for vaporising volatiles including organic compounds, and the stratigraphy of the underlying material is lost in the randomness of the ejected material.
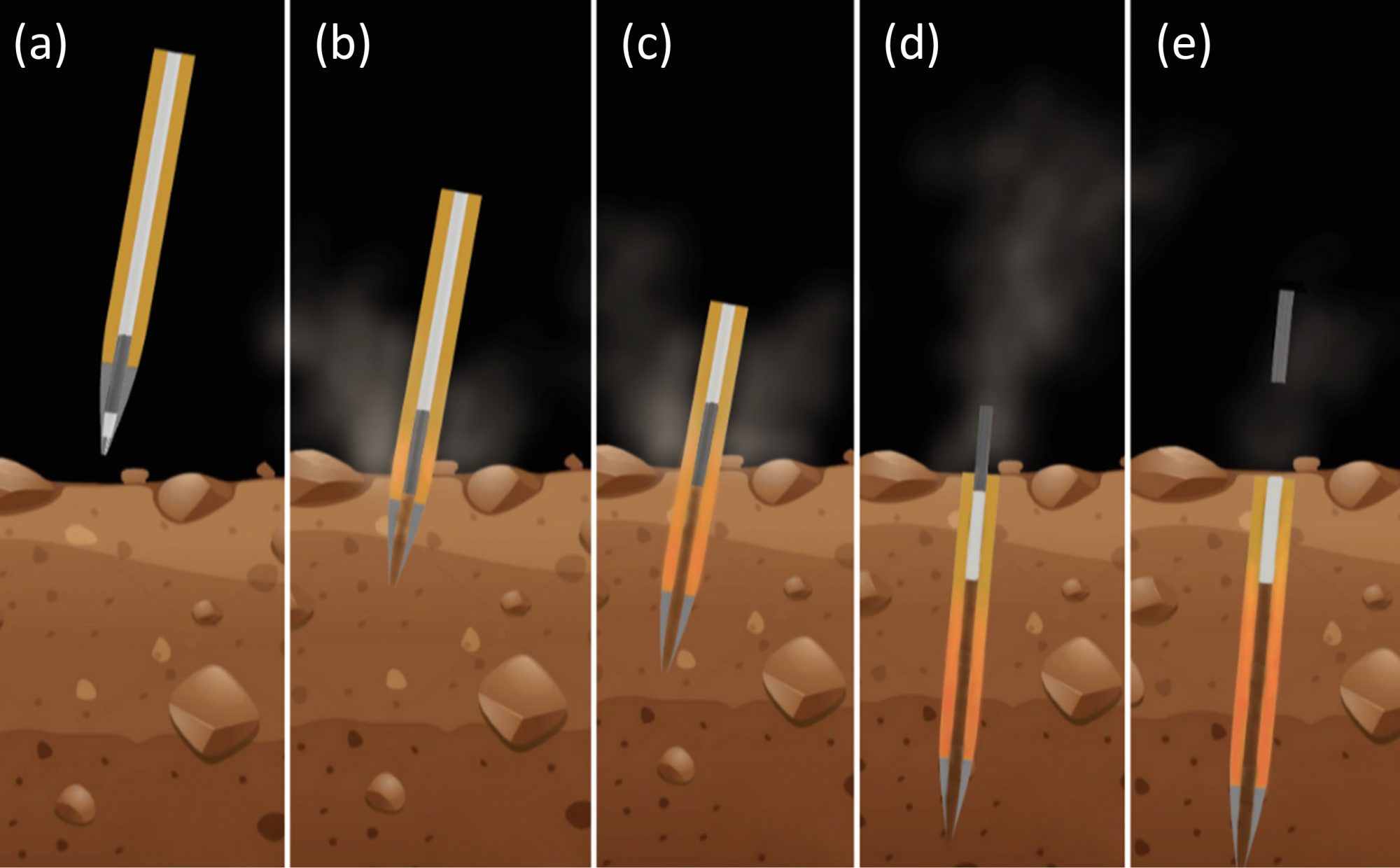
This series of articles discusses the development of a high-speed penetrator for sample return. The impact velocity is only 300-600 m/s which is sufficient to cut 1-2 m into the rock but slow enough that it reduces the chances of modifying the rock material. A schematic of operation of the system is shown in Figure 1. The penetrator is shaped like a dart – long (1-2 m) and skinny (diameter of 10-15 cm) with a hardened nose cone. Tool steel is presently used for testing due to its low cost and high strength, but other options are available with greater performance albeit at a greater cost.
Innovation through shock absorption
An important innovation is the centre feed tube that runs through the axis of the penetrator through which the sample return canister is fitted. As the penetrator cuts through the rock, the broken-up material flows into the sample return canister, retaining the overall stratigraphy of the underlying rock. A shock-absorbing spring stores some of the impact energy so that with the pressure from the upflowing material and the release of the spring energy, the sample canister is ejected back onto the surface fully laden with subsurface material ready for pickup.
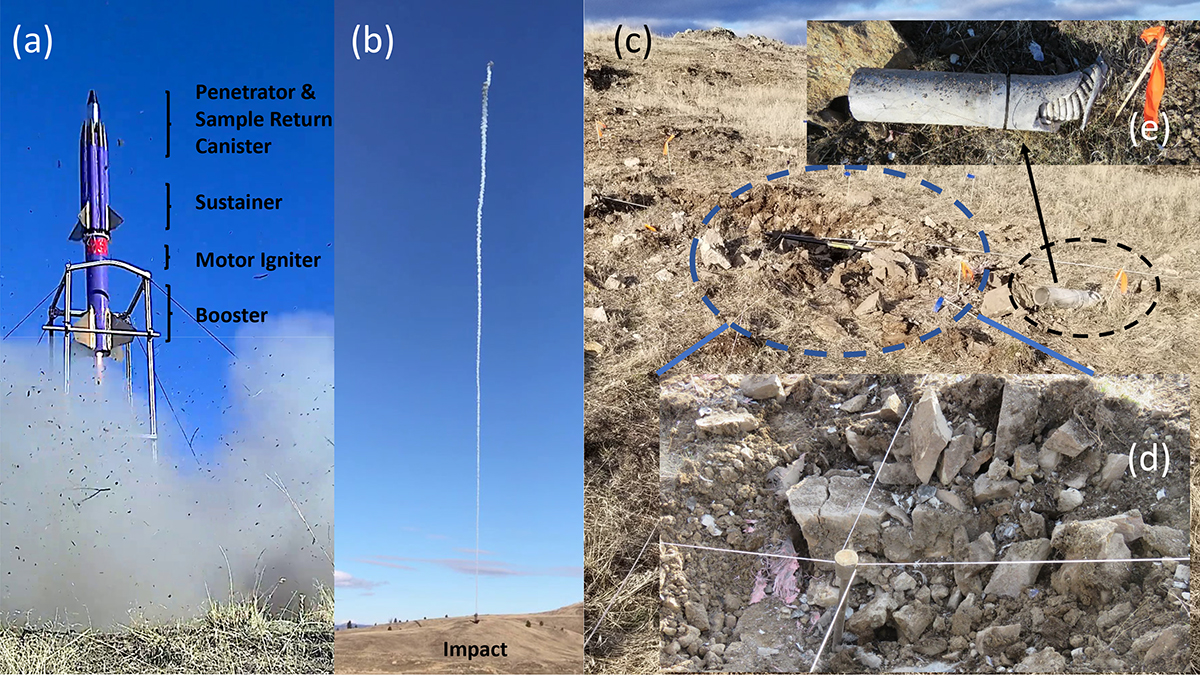
The impact energy comes from the speed differentials before the final braking manoeuvre of the spacecraft as it comes into orbit around the target so that the pyrotechnics of Hayabusa II is not required. Conversely, the terrestrial testing of the system is much more complicated – one needs to bring the penetrator system up to Mach 1-2. To do this, we use components attainable for amateur high power rocketry. The prototype system is shown in Figure 2A – the booster pushes the system to about 1000 m, inverts, and starts to fall back to Earth. When it reaches roughly 400 m above ground, the outboard sustainer motors (Figure 2b) are ignited, accelerating the rocket to the desired speed. The motors burn out just before impact.
In the following series of articles, we will discuss the characteristics of new samples collected from hard rock impacts as opposed to the initial testing into sandstone, followed by the discussions on finding and collecting the ejected samples, and the potential other applications of penetrator systems for solar system exploration.
References
Winglee, R. M., and C. Truitt, High-Velocity Penetrators as a means of extracting core samples from rocky solar system objects, Acta Astronautica, 137, 274, http://dx.doi.org/10.1016/j.actaastro.2017.04.022, 2017.
Please note: This is a commercial profile








