
Jen-Yuan (James) Chang, Professor at the Department of Power Mechanical Engineering, National Tsing Hua University in Taiwan, explains the essentials for robotic-assisted rehabilitation devices, including a design example of a wearable hand/finger rehabilitation robot
The development of robotic-assisted rehabilitation devices, the so-called rehabilitation robot, requires interdisciplinary synergy from both medical and engineering fields. In this article, several essential considerations in the development of a rehabilitation robot are discussed and illustrated by a wearable hand/finger rehabilitation robot developed through research funded by Ministry of Science and Technology, Taiwan. The future possibility of such rehabilitation robot will also be discussed in the context of treating the robot as a smart machine.
Rehabilitation meditated by the use of robotic devices has been an emerging and quite interesting research topic in recent years. Due to the demographic dilemma in developed countries in which an ageing population increases while the birth rate decreases, the option of adaptation of robotic devices to assist rehabilitation treatments for an ageing and impaired population does offer social and economic advantages over the traditional human-intensive option through physical therapists and occupational therapists.
Due to such advantages, in the past ten years, more and more novel rehabilitation robots attributed by traditional therapy concepts have been developed and even commercialised in products to assist lower limb, upper limbs and even hand rehabilitation. In robot-assisted rehabilitation, patients can obtain precise, repeatable, and even reliable rehabilitation treatment through motion exercises designed by doctors. However, the biggest challenge in the research and development of robotic-assisted rehabilitation devices, or commonly called the rehabilitation robots, is the integration of interdisciplinary engineering fields with considerations from clinical requirements.
Such integration is not to the degree of complexity among medical and engineering expertise but to the level in which to offer the best solution to patients with the right combination of suitable elements for effective rehabilitation. In other words, the balance among the clinical needs and the realisation of engineering approaches is, in fact, the key to the success of the development of rehabilitation robots.
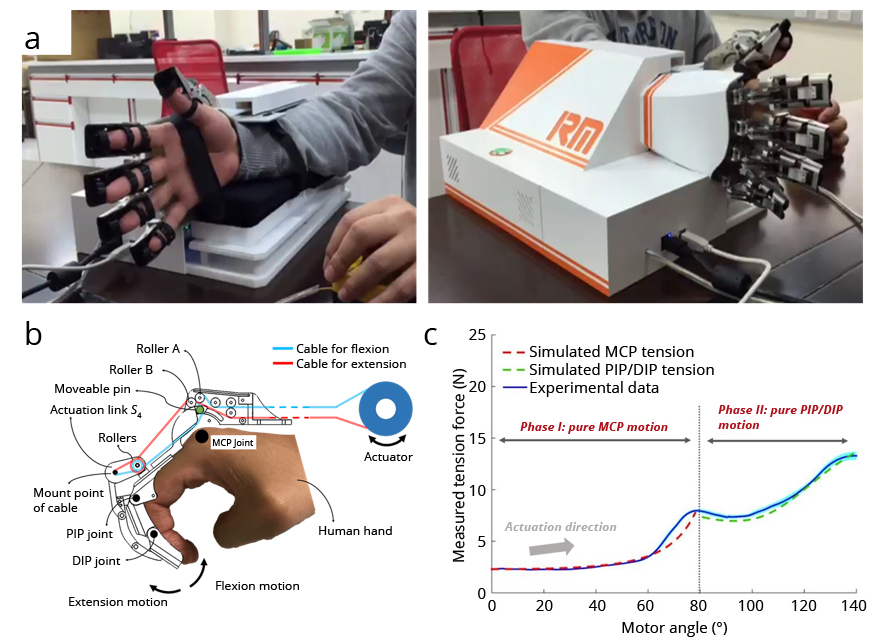
In this article, essentials for the development of rehabilitation robots will be discussed in the context exampled by the wearable hand/finger rehabilitation robot as shown in Figure 1(a) which was developed by Professor Chang’s research group through research projects funded by Ministry of Science and Technology in the Department of Power Mechanical Engineering at National Tsing Hua University, Taiwan. Such designs were further realised in the commercial-ready product by spin-off company from the group named Rehabotics Medical Technology Cooperation (RMTC).
During robot-assisted rehabilitation, robot structures are applied upon disabled limbs with motor impairments caused by strokes, sports injuries or accidents. Driven by the robot actuators, the robot structure can then carry or move the disable limbs to perform rehabilitation exercise.
As the example in Figure 1(b) shows, since the rehabilitation robot has its structure applied on a human finger, the first essential consideration is to include the human factors in the robot design. Such factors include the dimension of a human finger and thumb’s proximal, middle, and distal phalanges, as well as the range of rotation for finger’s metacarpo-phalangeal (MCP), proximal-interphalangeal (PIP), and distal-interphalangeal (DIP) joints. These factors will vary from race, age, gender etc. and play a significant role in the effectiveness of the robot’s motion.
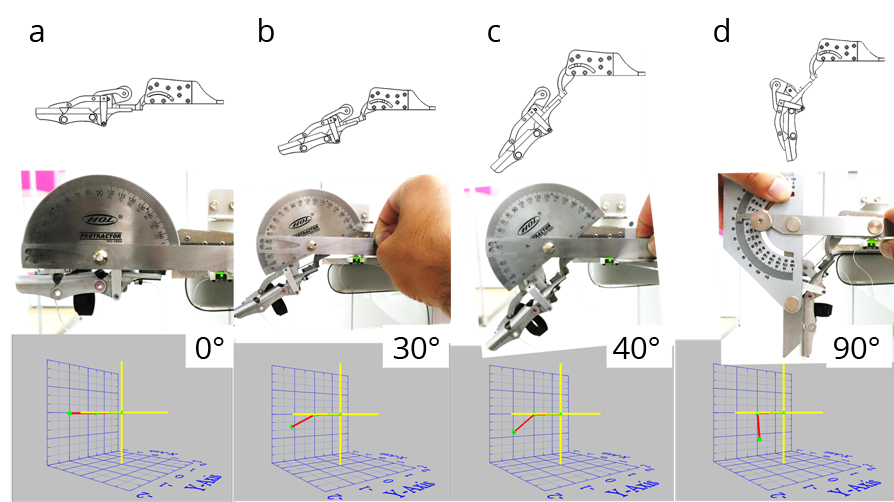
With the human factors considered, the next essential consideration is then placed on the medical side by offering the appropriate rehabilitation exercise which will lead to the structure and mechanism designs of the rehabilitation robot. Taking the model finger robot as an example, as shown in Figure 2(a)-(d), the motions between the MCP and PIP/DIP joints are decoupled through mechanism design so that robot’s movement pattern can be analogous to that observed in the human hand, as well as requested by medical doctors.
Once the robot’s movement pattern is confirmed and achieved by mechanism designs, the next essential consideration is on the mechatronics integration, which includes the selection and implementation of actuators, sensors, and controller in the robot. For the model finger robot as illustrated in Figure 1(b), limited by space to accommodate for a higher degree of motion in hand/finger rehabilitation, the finger robot is not directly driven by motors but designed to be driven by cables actuated by motors which are placed away for impaired hand/fingers. The main objective of the rehabilitation robots is not only to offer repeated motion but to provide biological insight of impatiens can improve by the use of the robot.
For stroke patients, their degree of spasticity degree judged offline but can’t be monitored during rehabilitation treatments. With the model robot, such online monitoring of finger joint spasticity can be achieved by the embedded force sensor data as exampled by the robot’s cable force measurement as shown in Figure 1(c).
Also, with the use of motion sensor, such as inertial measurement unit called IMU sensor which is embedded in the robot structure, positions and orientations of the robot movements can also be monitored real-time. Should the rehabilitation exercise be deviated from the designed path, with well-design control codes, the controller unit in the robot can alter the actuator’s motion to direct the robot to move the human body back to the designed course. Since the robot possesses the capability in collecting force and kinematic information of the robot and patient, rehabilitation big data can then be established through medical trials and practices.
Certainly, with such a smart machine, the rehabilitation robot, new medical knowledge in rehabilitation is thought to be generated in the near future should the data be carefully integrated and examined with artificial intelligence (AI) technologies.
Please note: This is a commercial profile
Jen-Yuan (James) Chang
Professor
Department of Power Mechanical Engineering
National Tsing Hua University, Taiwan
Tel: +886 3 574 2498
http://www.pme.nthu.edu.tw/files/14-1265-74003,r4027-1.php?Lang=en








