
Here, Jen-Yuan (James) Chang discusses pioneering research and innovation by National Tsing Hua University of robot assisted rehabilitation for those who have suffered a stroke
To contend with an ageing population and limited availability of healthcare manpower, the adaptation of robotics in rehabilitation has increased. In particular, developed countries are where aging is having a significant effect in result in long-term disabilities. Stroke, which can primarily contribute to hypotonia and chronic hemiparesis, have been found to be one of the major causes for long-term disabilities, leading to limb/hand functional impairments in patients.
Due to limitation of muscle motor capabilities, hyperexcitability of the stretch reflex is commonly found in stroke patients. The so-called “stiffness” or “tightness” of muscles in the stroke patients is referred to the muscle spasticity which is caused by hyperexcitability of motoneurons.
In medical practices, it is found that with precise and repeated range of motion (ROM) exercises, the aforementioned flexor hyperexcitability can be reduced. In present practices, the ROM exercises are operated by the therapist’s hands to temporarily reduce the severity of spasticity. In evidence-based medicine, it is demonstrated that with robot-assisted rehabilitation, the high-repetitive and high-precision movements can greatly improve the quality of rehabilitation for stroke patients.
In this article, an exoskeletal robot which is designed to perform precise and repeated robot-assisted movements by aligning with human finger counterparts is discussed in the context of a commercially available product called “Mirror Hand” by Rehabotics Medical Technology Corporation (RMTC). The technology behind this Mirror Hand robot was developed by Professor Chang’s group in National Tsing Hua University and Dr Yu-Cheng Pei’s group in Chang Gung Memorial Hospital, Taiwan through a project named “Development of Customized Robot-Assistive Exoskeleton System for Palm-Finger Physical Rehabilitation” which was funded by Ministry of Science and Technology, Taiwan and later transferred to the RMTC.
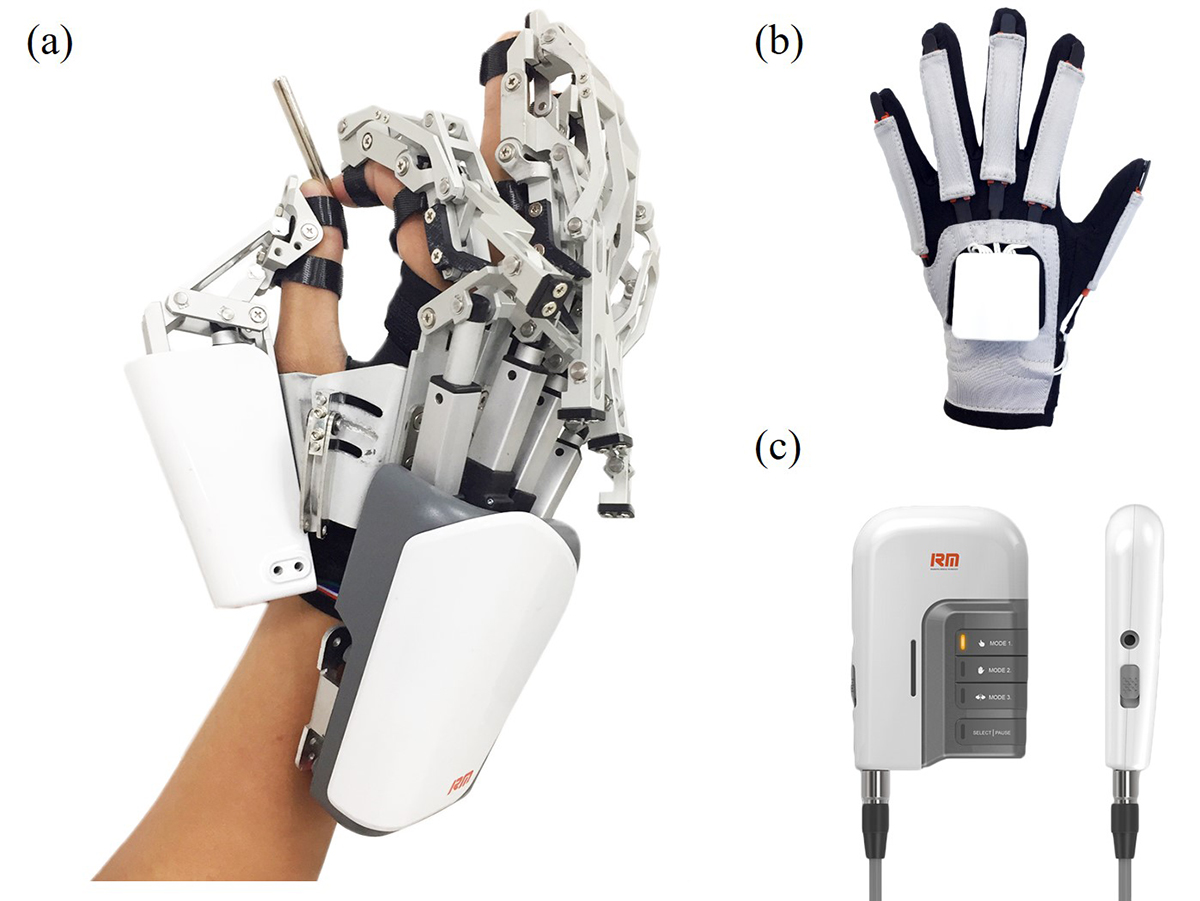
Traditionally, the rehabilitation process is conducted in hospital or clinics due primary to the device’s inevitable bulky mechanism, not to mention the possibility of offering dexterous movement in stroke patient’s fingers. To offer enough dexterity and work with the traditional rehabilitation used in everyday situations, the Mirror Hand as illustrated in Figure 1 is designed to be a light-weighted, convenient to use, and easy-to-operate hand robotic device that can be used both in traditional rehabilitation units in hospital/clinics and in-home care with supervision of medical personnel.
Accounting for human factors and natural movement of fingers, the exoskeletal hand as shown in Figure 1(a) is designed through precision mechatronics and bio-medical integration processes to offer total weight of less than 800 grammes, significant reduction of uncomfortable pressure on patients, and to provide certified biocompatibility when worn by patients. The exoskeletal hand worn on a stroke patient’s impaired hand can be controlled by the sensor glove as shown in Figure 1(b) which is worn by the patient’s healthy hand or the therapist’s hand. This sensor glove is also designed with biocompatible but breathable materials offering comfort and light weight of 107 grammes for convenient wearing and operating.
The finger movements acquired by the sensor glove are directly fed into the light-weighted control box (125 grammes) as shown in Figure 1(c), with its signals processed by a well-engineered signal processing algorithm to identify the proper hand/finger movements and then to duplicate the movements in exoskeletal hand. With such portable and precise designs, the Mirror Hand certainly removes the traditional rehabilitation restrictions and enables patients to conduct rehabilitation exercises beyond rehabilitation centres.
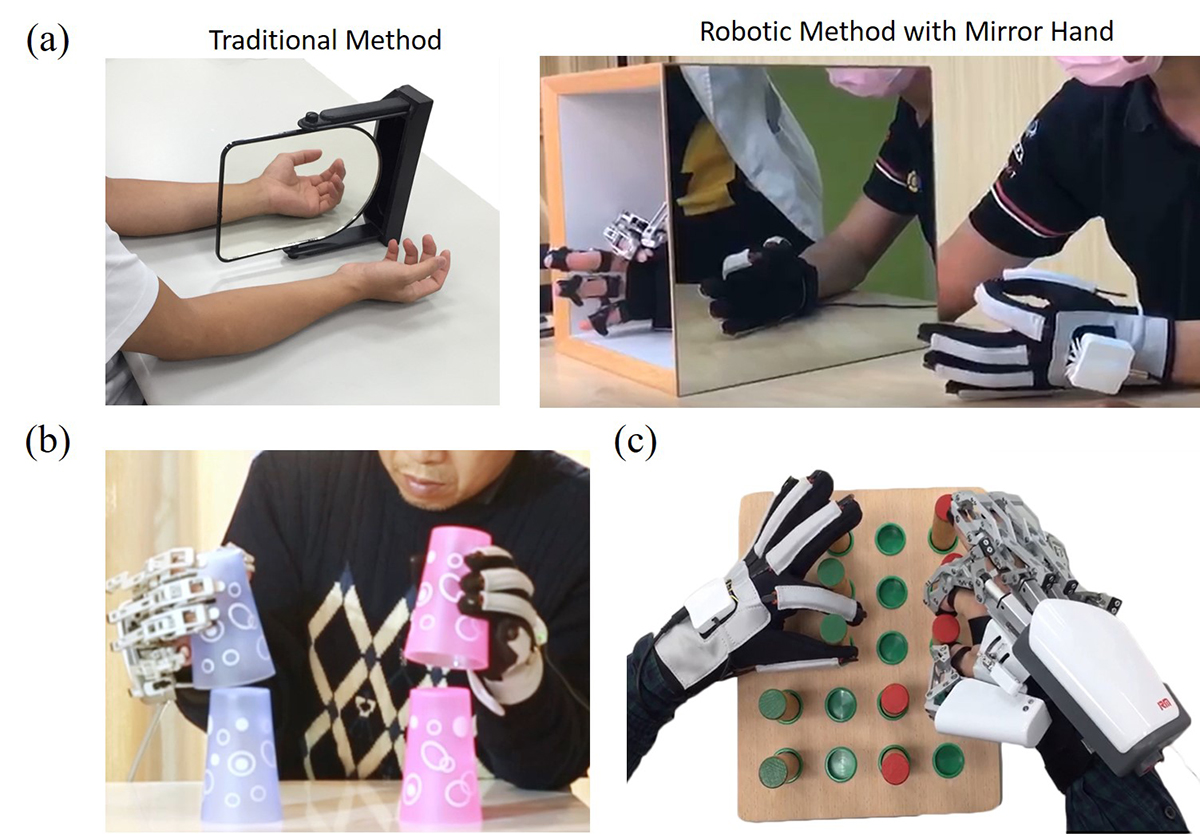
With these functions, sensing technology is utilised in the Mirror Hand provides conventical Continuous Passive Movement (CPM) model and bimanual therapy. With the Mirror Hand device, patients can guide the impaired or affected hand using their own healthy hand to perform mirror therapy. As shown in Figure 2(a), the affected hand is simply placed behind the mirror without any movement, in the traditional mirror therapy exercise, while the healthy hand moves for the patient to see the reflection in the mirror to stimulate reconstruction of neurons. With the Mirror Hand device, the traditional therapy method is preserved but with enhancement of actual movement in the impaired hand with the robot. In the bimanual rehabilitation mode, the Mirror Hand allows patients to grasp big objects such as cups as illustrated in Figure 2(b) and to grip small objects such as the coloured cylinders or screws as shown in Figure 2(c).
This innovative robotic device has obtained Taiwan FDA certification, passed ISO 13485:2016 regulations, and recognised with 2018 National Innovation Award. By applying the robot-assisted rehabilitation technology, it is hoped that stroke patient finger muscle strength and joint flexibility can be improved. This could avoid the phenomenon of muscle atrophy and joint sclerosis which occurs from long-term fixation in the same posture, neuromuscular disorders and diseases that lead to permanent loss of hand functions.
*Please note: This is a commercial profile








