
Professor Ken Saito and PhD candidate Yuki Takei, College of Science and Technology, Nihon University, tells us about a project they are working on to generate typical animal like actions in robots
Advances in engineering represented by advanced control technology and the computational capability of processors have led to legged robots with high mobility and robustness.
The “Spot” is one of the most famous general-purpose quadruped robots. It has already begun to work in the fields, such as inspecting factories and recording progress at construction sites. Nevertheless, none of the robots can respond flexibly to unexpected events and behave autonomously as animals. Although robots will gradually improve as computers become more powerful, as we have seen in the past, there is a significant capability gap between robots and animals. The significant difference between them arises from the need for the brain (or processor) to calculate all of its behaviour.
Animals can unconsciously generate typical actions with nervous systems such as respiration, chewing, walking, and so on. Particularly, quadruped animals locomote efficiently by switching phase differences between their legs (gaits) according to locomotion speeds. Since walking is necessary for legged stuff, knowledge about gait generation mechanisms will solve the problems limiting current robot control methods. However, despite many studies on the structures and functions of nervous systems, much remains unknown.
Quadruped robot system with artificial neurons
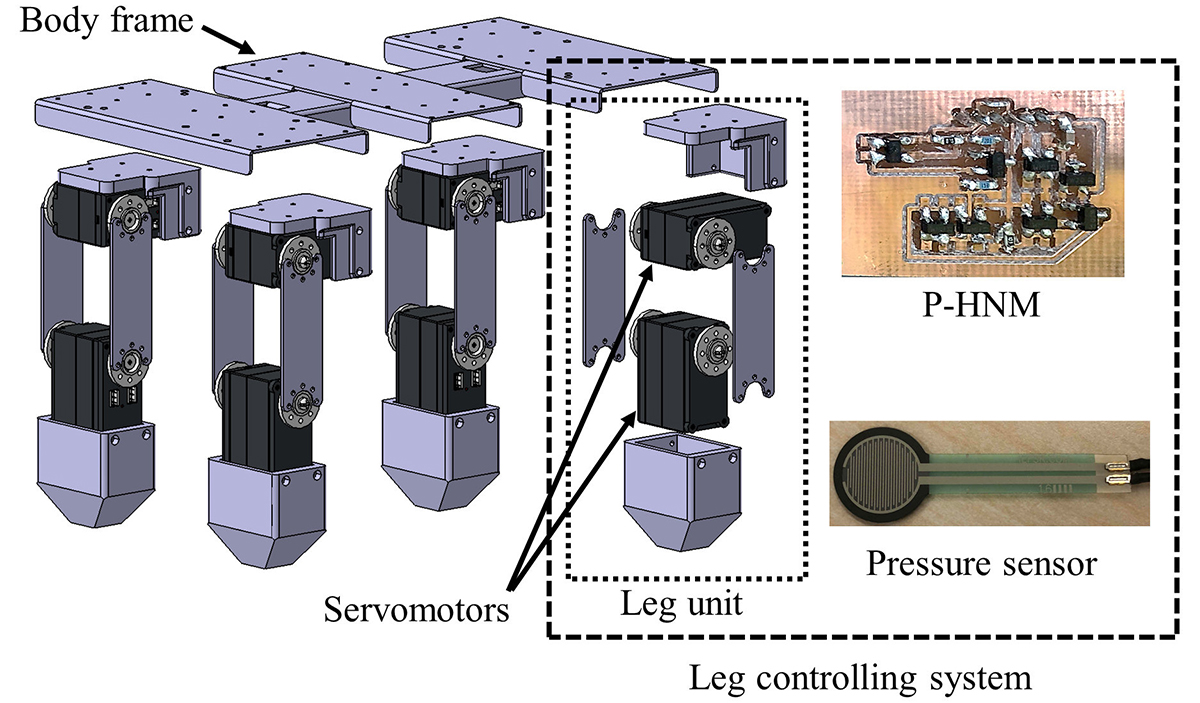
Takei and Saito’s team are studying to realise a robot system that can generate typical actions like animals. Therefore, the team developed a quadruped robot system with a bio-inspired gait generation method to investigate the animals’ gait generation method. The method uses pulse-type hardware neuron models (P-HNMs) to control its legs. The P-HNM emulates biological neurons’ pulse waves generating function with analogue electrical circuits.
The quadruped robot’s body is constructed by assembling a body frame and four-leg units. Each leg unit has two joints using servomotors and a few simple parts. The robot system has degrees of freedom only in the leg units. Pressure sensors are attached to each sole. As shown above, the robot system uses standard robotics components. In addition, although nonlinear behaviours of the output of P-HNM make it seem special, it is composed of basic elements such as MOSFETs, capacitors, and resistors. However, the gait generation method is novel.
Gait generation method
The gait generation method individually drives joints using P-HNMs, pressure sensors, and a micro-controller. The method links each P-HNM, pressure sensor, and servomotors as a leg controlling system. Therefore, the quadruped robot system comprises four-leg controlling systems. The microcontroller drives each joints’ angles of a leg controlling system by a constant angle when a linked P-HNM outputs a pulse. The pulse period becomes longer depending on the pressure at the sole. Thus, the pressure reduces the angular velocity of the joints.
Although leg controlling systems and P-HNMs are not connected to any other one, the legs’ behaviours interact with each other due to the difference in weight supported by each leg.
Findings from experiments
The team demonstrated the quadruped robot’s behaviour due to experiments on a flat floor. Experimental results showed that the robot system could generate the walk gait at low-speed and the trot gait at high-speed locomotion. Therefore, the quadruped robot system could actively generate gaits by reducing joints’ angular velocities depending on the pressure on soles. In addition, the robot system could generate different gaits depending on the locomotion speed.
Since the role of P-HNMs in the gait generation method is simple, a wide variety of oscillators can replace them. However, to implement a system with functions other than gait generation (e.g., posture controlling, direction changing) in a robot, using P-HNMs will be effective. Because locomotion requires immediate process information.
Further findings from dynamic simulations
The team imported the robot’s body into a dynamic simulator as a quadruped robot model to analyse its dynamical behaviour. Since the simulator does not simulate electrical circuits, the team implemented an alternative gait generation method that does not use P-HNMs in the model. Although P-HNM behaves nonlinearly, the team first programmed the alternative method that decreases the joints’ angular velocity linearly with pressure on the soles. Nevertheless, surprisingly the robot model could actively generate animals’ gaits like the quadruped robot system.
These methods are based on a previously proposed method that controls the legs according to phases of four decoupled oscillators and feeds back pressures to oscillation speeds. In the previously proposed method, the strength of feedbacks and oscillation speeds were accelerated or decelerated depending on oscillators’ phases.
In contrast, the team’s methods only decrease angular velocities depending on pressures. In addition, the methods do not use legs’ phases to control legs. Consequently, the robot actively behaves as an oscillator due to dynamic interactions occurring in its body and legs. Therefore, the methods are not only simple but also use interactions with the environment like animals. Thus, they will allow us to realise a robot controlling method that can locomote like animals and get closer to their gait generation mechanisms.
Please note: This is a commercial profile
© 2019. This work is licensed under a CC BY 4.0 license.








